|
||
|
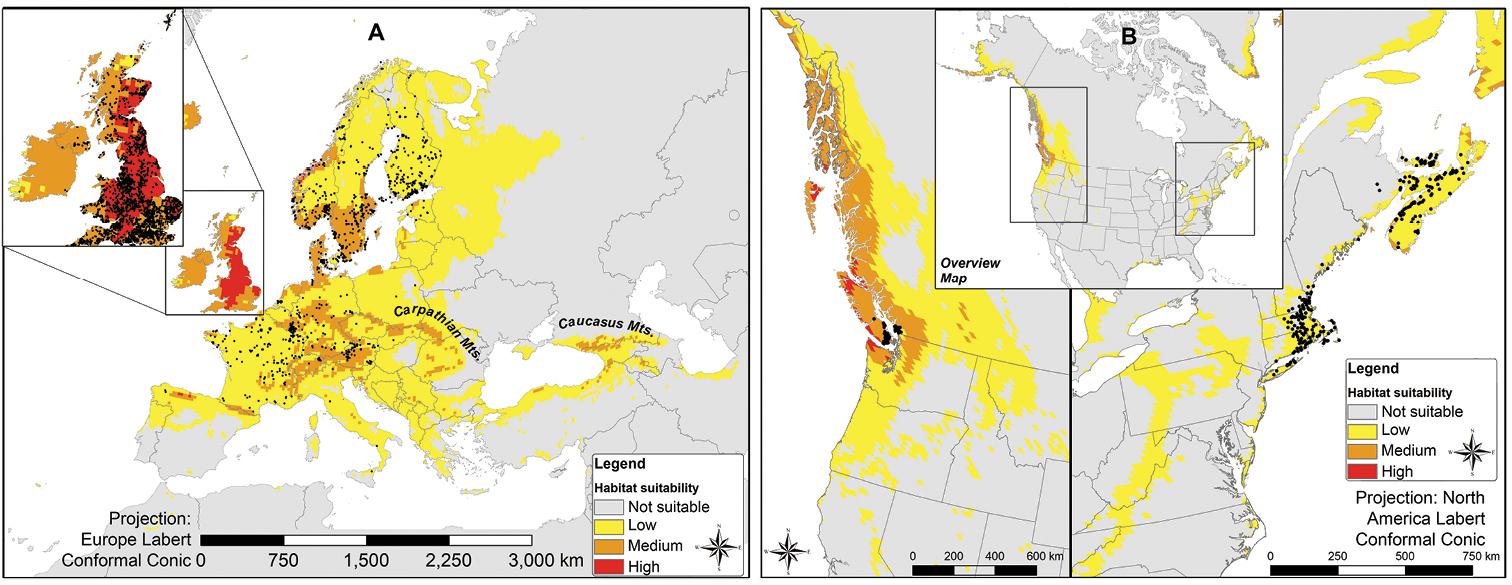
Predicted suitable habitat in native range (panel A) and invaded range (panel B) with occurrence records (shown as black dots), this reclassified map is based on the averaged prediction for three spatial bins in the native range. Probabilities falling below balance threshold values shown in Table 2 for each of the three models were classified as “not suitable”. Probabilities < 0.25 were classified as “low suitability”, values > 0.25 but < 0.5 were classified as “medium suitability” and values > 0.5 were considered “high suitability”. |